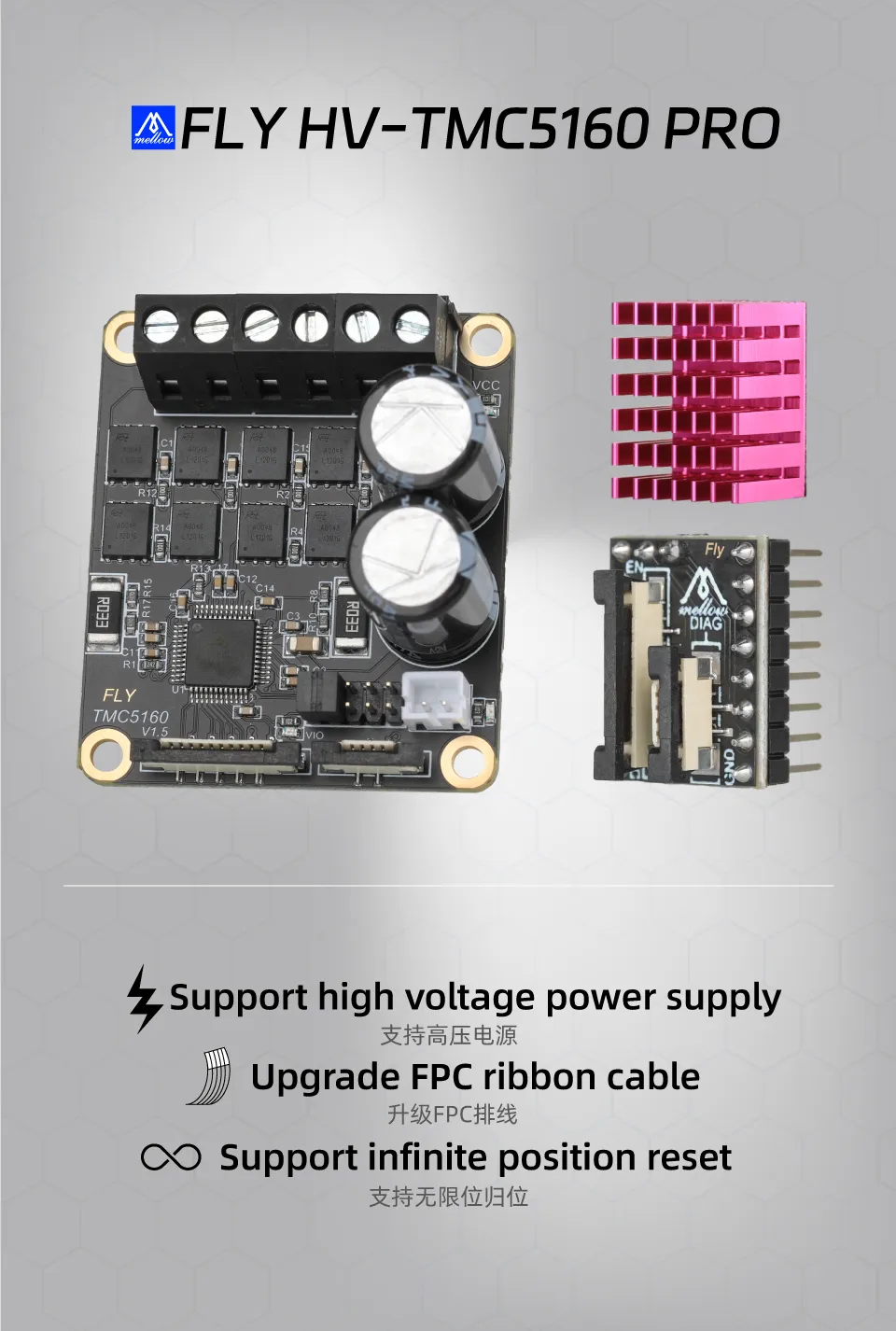
TMC 5160 Pro V1.5
Основные параметры
- Напряжение питания : 24-48В
- Максимальный ток : 6А
- Совместимость : ФIRMWARE Marlin/Klipper/RRF
- Поддерживаемые режимы управления : TMC : SPI
- Интерфейс шаг/направление с поддержкой микроскалирования microPlyer
- Максимальная разрешающая способность 256细分
- Поддерживает работу в режиме stealthChop2 для тихой работы и плавных движений
- Поддерживает подавление резонансов на средних частотах
- Поддерживает режим управления loadCycle с высокой динамикой
- Поддерживает управление скоростью dcStep, связанное с нагрузкой
- Поддерживает детектирование нагрузки stallGuard2 с высокой точностью без датчиков
- Поддерживает управление током coolStep для экономии энергии до 75%
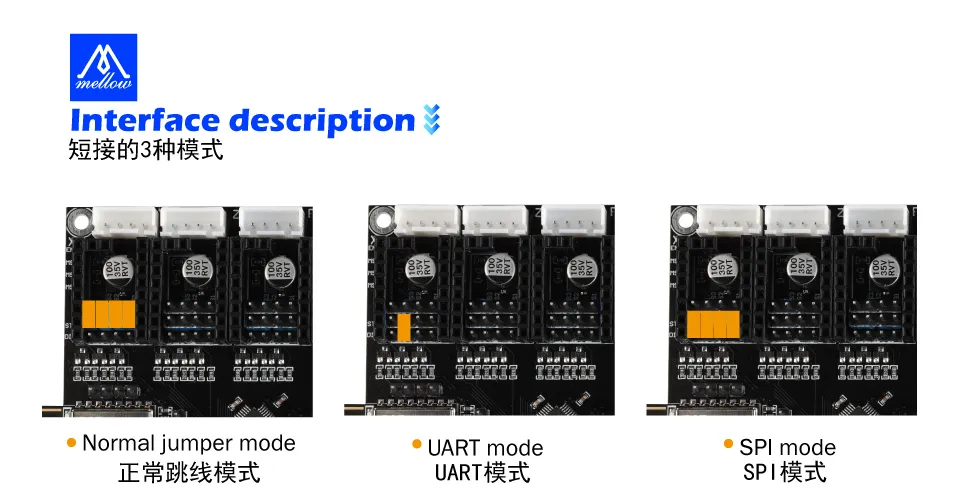
Инструкции по настройке переключателей на материнской плате
- Для работы TMC5160 Pro необходима настройка SPI переключателя
- Пины SPI FLY драйвера находятся на левой стороне, считая сверху, четвертый пин, CS пин является пином SPI. Если конфигурация не соответствует положению пинов, использование SPI невозможно
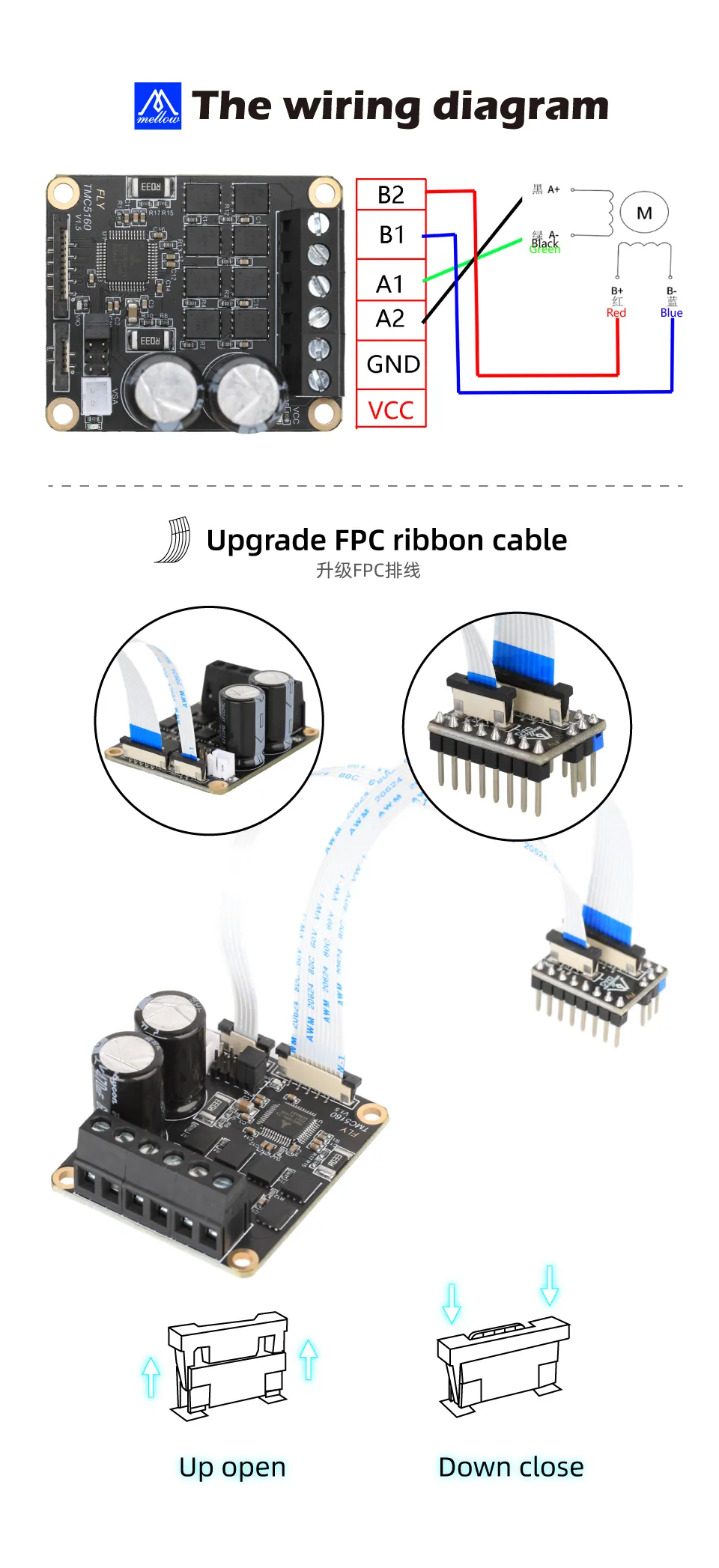
Установка FPC на материнскую плату
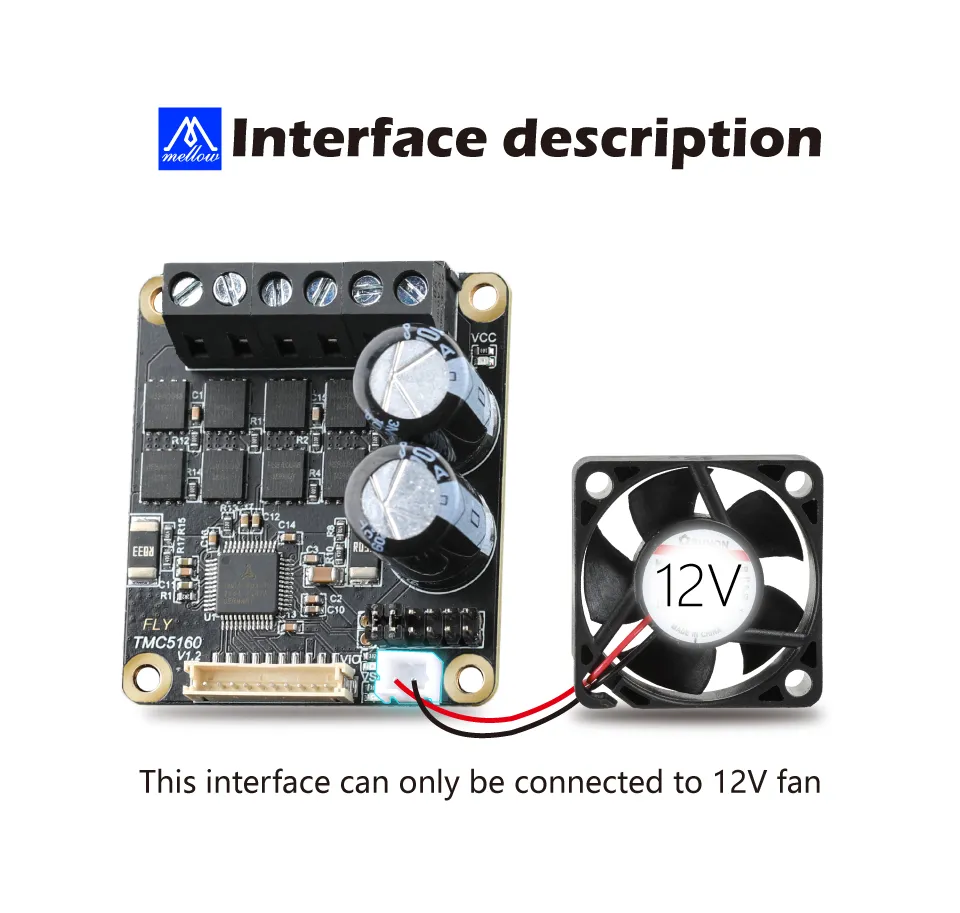
Подключение 12V FAN
Справочная конфигурация TMC5160 Pro
осторожно
- Резистор выборки драйвера должен быть установлен как
sense_resistor: 0.033, ошибочная настройка недопустима - Параметры
spi_busиspi_softwareмогут быть выбраны только один из них
Пример конфигурации в режиме SPI
[tmc5160 stepper_x]
cs_pin:
spi_bus:
# spi_software_mosi_pin:
# spi_software_miso_pin:
# spi_software_sclk_pin:
run_current: 1.0 # Значение тока при работе двигателя
interpolate: False # Включить ли 256-кратную микроскалировку (вкл - True, выкл - False)
sense_resistor: 0.033
stealthchop_threshold: 0
driver_DISS2G: 1
driver_DISS2VS: 1
Инструкции по использованию без концевиков
:::подсказка Использование без ограничений
- Использование без ограничений требует использования одного порта ограничения, обычное использование: первый драйвер использует IO1, второй драйвер использует IO2 и т.д.
- При использовании без ограничений обратите внимание, не подключайте ничего к соответствующим портам ограничений
- На некоторых материнских платах FLY драйверы подключаются напрямую, обратите внимание на прямое подключение DIAG к соответствующим выводам
:::
Совет по использованию без концевиков
- Этот драйвер требует установки 4-пинового FPC для работы
- Конечная точка
endstop_pin:должна быть отключена или удалена, а вместо этого добавлена строкаendstop_pin: tmc5160_stepper_x:virtual_endstop - После настройки
diag0_pin:состояние концевика должно быть неактивным - Настройка
driver_SGT:требует самостоятельного тестирования подходящего значения
- Пример конфигурации
[stepper_x]
# endstop_pin:PF3
endstop_pin: tmc5160_stepper_x:virtual_endstop
homing_retract_dist: 0 # Отступ при обратном ходе не должен быть изменен, чтобы избежать неудачного возврата
[tmc5160 stepper_x]
diag0_pin: ^!
driver_SGT: 1
# После настройки убедитесь, что состояние концевика неактивно
# Этот пин обычно используется с префиксом "^", чтобы включить внутреннее подтягивание
# Сенсибильность зависит от натяжения ремня и требует настройки
# (убедитесь, что также установлен параметр driver_SGTHRS на подходящее значение)