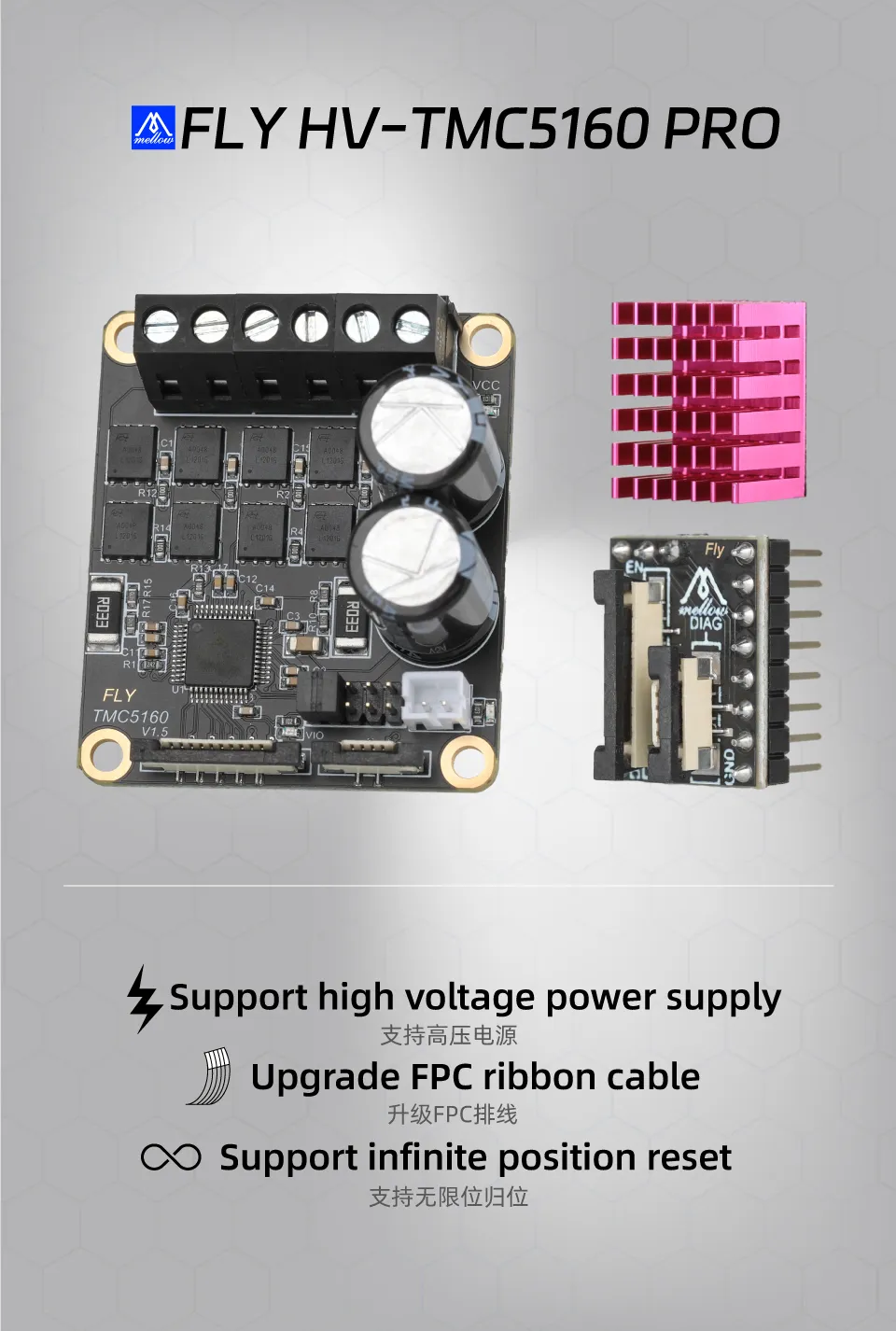
TMC 5160 Pro V1.5
Paramètres de base
- Tension d'entrée : 24-48V
- Cour maximum : 6A
- Convient pour : Firmware Marlin/Klipper/RRF
- Mode de pilotage pris en charge : TMC : SPI
- Interface de pas/direction avec interpolation microPlyer
- Résolution maximale de 256 subdivisions
- Prise en charge du fonctionnement silencieux et des mouvements fluides avec stealthChop2
- Prise en charge de l'amortissement de résonance pour les résonances à fréquence moyenne
- Prise en charge du commutateur de découpe spreadCycle pour un contrôle moteur dynamique élevé
- Prise en charge du contrôle de vitesse lié à la charge avec dcStep
- Prise en charge de la détection de charge de moteur sans capteur avec stallGuard2 haute précision
- Prise en charge du contrôle de courant coolStep, pouvant économiser jusqu'à 75% d'énergie
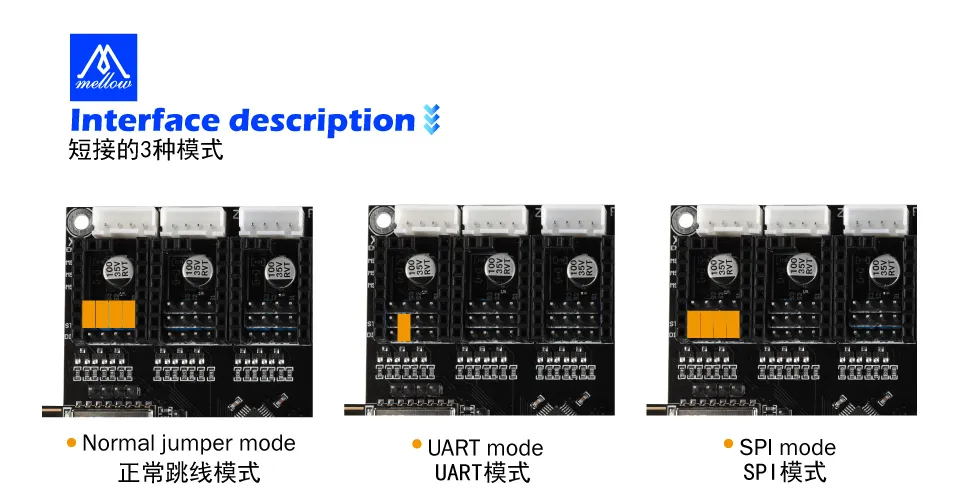
Explications sur les sauts de carte mère
- Le TMC5160 Pro utilise un saut SPI
- Les broches SPI de FLY sont la quatrième broche en partant du haut vers le bas, CS est la broche SPI. Si la carte mère n'a pas les broches correspondantes, l'utilisation de SPI n'est pas possible.
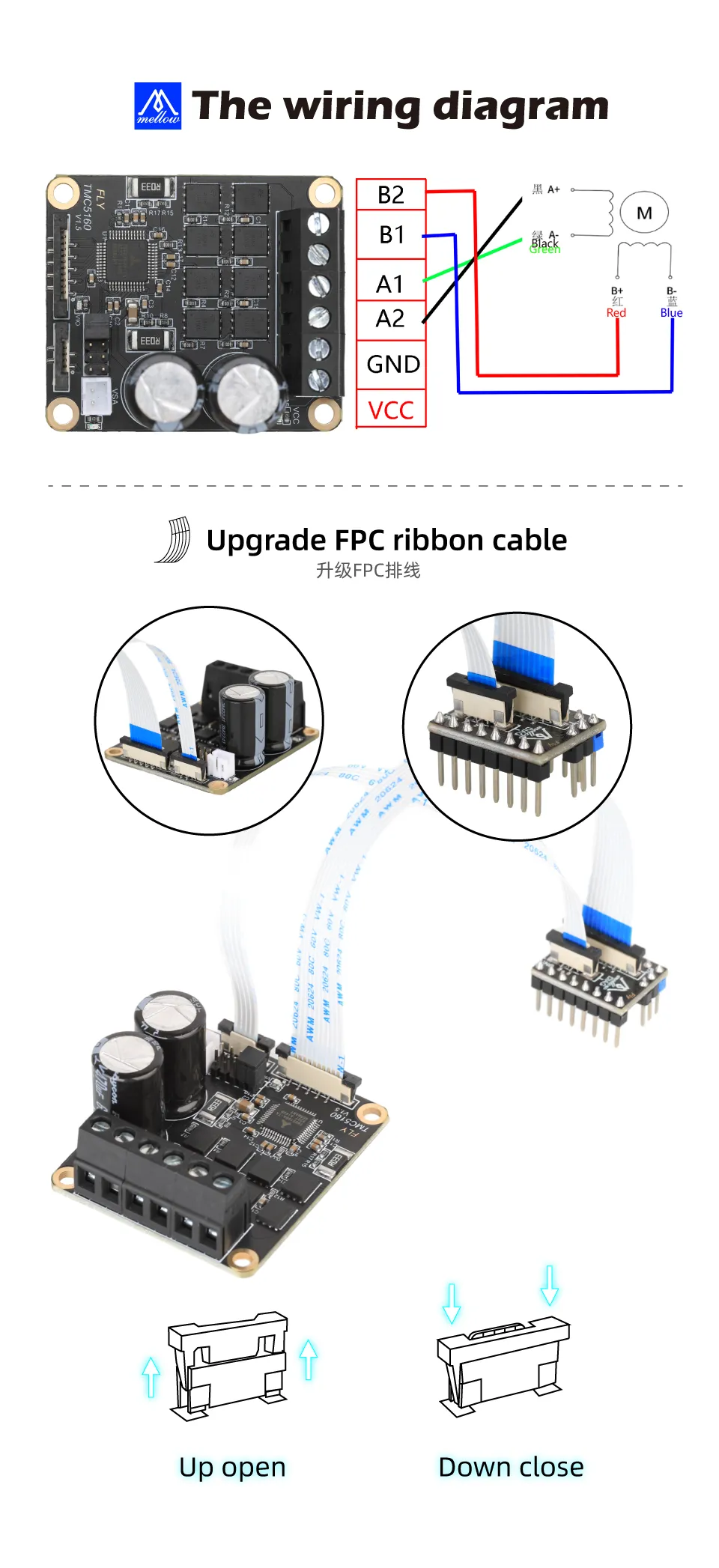
Installation du FPC de la carte mère
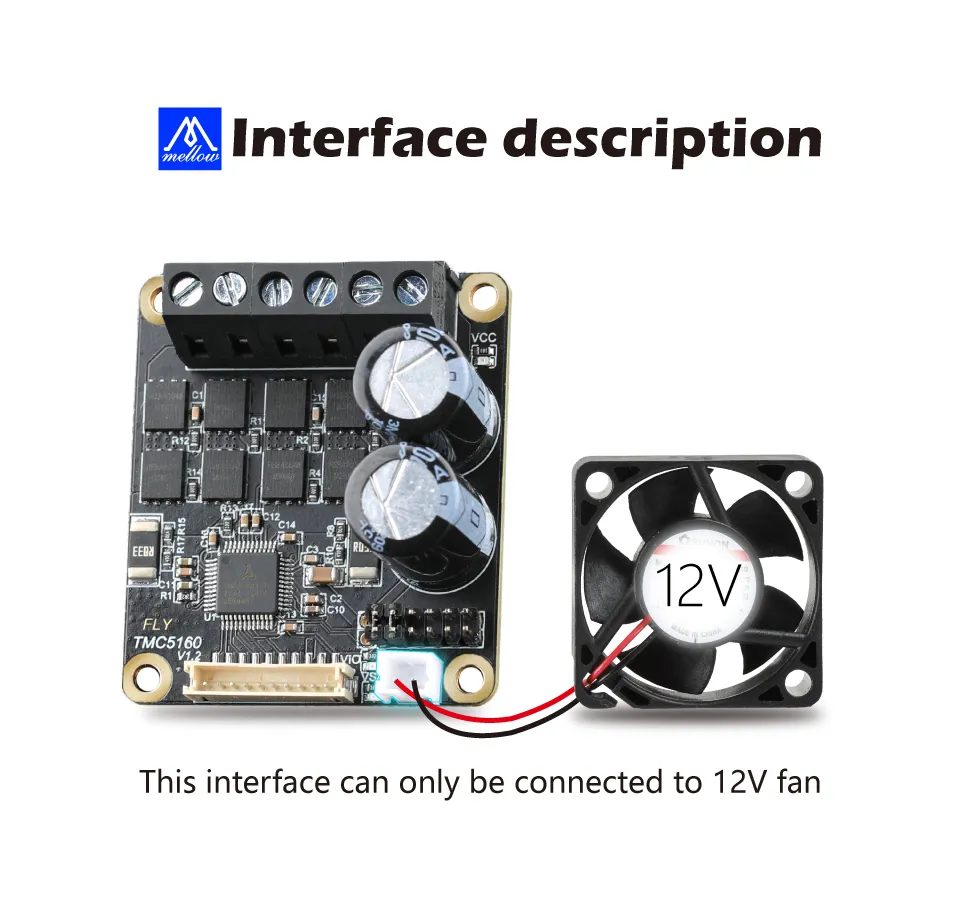
Branchement du ventilateur 12V
Références de configuration pour TMC5160 Pro
dangereux
- La résistance d'échantillonnage du pilote est
sense_resistor: 0.033veuillez ne pas la configurer incorrectement spi_busetspi_softwarene peuvent être utilisés qu'en une seule option
Configuration de référence en mode SPI
[tmc5160 stepper_x]
cs_pin:
spi_bus:
# spi_software_mosi_pin:
# spi_software_miso_pin:
# spi_software_sclk_pin:
run_current: 1.0 # Valeur du courant de fonctionnement du moteur
interpolate: False # Activer ou non l'interpolation de 256 micropas (activer est True, désactiver est False)
sense_resistor: 0.033
stealthchop_threshold: 0
driver_DISS2G: 1
driver_DISS2VS: 1
Instructions d'utilisation sans fin de course
Astuce pour l'utilisation sans limite
- L'utilisation sans limite nécessite l'occupation d'une sortie limitée, en général, la position de pilotage n°1 utilise IO1, la position de pilotage n°2 utilise IO2, et ainsi de suite
- Veuillez faire attention lors de l'utilisation sans limite : ne connectez rien aux sorties limitées correspondantes
- Certaines cartes mères FLY sont directement connectées aux broches de pilotage, veuillez vérifier si DIAG est directement connecté à la broche correspondante
Conseils d'utilisation sans fin de course
- Ce pilote nécessite que le FPC à 4 broches soit installé pour être utilisé
- L'ancienne
endstop_pin:doit être masquée ou supprimée, puis ajouterendstop_pin: tmc5160_stepper_x:virtual_endstop - Après avoir configuré
diag0_pin:, l'état de fin de course sera non déclenché - La configuration de
driver_SGT:nécessite un test d'une valeur appropriée
- Configuration de référence
[stepper_x]
# endstop_pin:PF3
endstop_pin: tmc5160_stepper_x:virtual_endstop
homing_retract_dist: 0 # Aucun retrait lors du retour à la maison ne devrait pas être modifié à 0 pour éviter un échec du retour à la maison
[tmc5160 stepper_x]
diag0_pin: ^!
driver_SGT: 1
# Assurez-vous que l'état de fin de course est non déclenché après la configuration
# Ce fil est généralement préfixé par "^" pour activer la résistance interne de tirage en haut
# La sensibilité est liée à la tension de la courroie et doit être ajustée manuellement
# (Assurez-vous également de définir driver_SGTHRS sur une sensibilité appropriée)